Overview of LiDAR Technology: A Potent Branch of Remote Sensing
Remote sensing is a powerful tool for collecting data without direct physical contact with the object or the surface of the earth.
MMoradi
· 12 min read· 22 views

Remote sensing is a powerful tool for collecting data without direct physical contact with the object or the surface of the earth.
Quick answers to common questions.
What area of the earth's surface can you measure in one hour? 1 square meter? 100 square meters? What is your opinion about the speed of 50 square kilometers per hour and the rate of millions of points per minute? How? The answer is clear, LiDAR (Light Detection and Ranging). In this article, we will discuss LiDAR technology for remote sensing.
Remote sensing is a powerful tool for collecting data without direct physical contact with the object or the surface of the earth. With the invention of photography and the launch of Landsat in 1972, remote sensing began to develop and has seen many developments in recent years. Light Detection and Ranging (LiDAR) is one of the most modern and efficient branches of remote sensing (Agrawal and Khairnar, 2019).
In recent years, LiDAR technology in remote sensing has been welcomed by researchers so LiDAR has become popular and widely used in various applications such as water science, navigation, transportation, etc. Despite the challenges and limitations of LiDAR remote sensing, improvements have also been made in LiDAR in enhancing the range detection, accuracy, and physical features, increasing its applications in the future (Raj et al., 2020). In this article, the details of LiDAR technology in remote sensing (mechanism, types, and brief applications) are discussed.
LiDAR (Light Detection and Ranging), also called laser altimetry, emerged in the mid-1990s, and today LiDAR technology in remote sensing has a high ability to provide accurate and high-speed data. LiDAR technology is known as the most modern branch of active remote sensing. LiDAR emits a pulse to the target object with a laser and the pulse emitted from the ground object is received again by LiDAR in the form of radiation backscatter. The pulses emitted by LiDAR cover a wide electromagnetic spectrum (from ultraviolet to infrared). The reflections from the laser beam create point clouds that cause range, orientation, and intensity to be measured by LiDAR remote sensing. LiDAR can extract and record horizontal and vertical data with high spatial resolution and vertical accuracy by measuring the delay time between round trip pulses and having a laser speed that is equal to the speed of light (Lefsky et al., 2002; Yan et al., 2015; Lim et al., 2003; Wehr and Lohr, 1999).
Based on the position of its sensor for laser scanning, there are two types of LiDAR remote sensing: Airbone-based LiDAR and ground-based (terrestrial) LiDAR, which are different in terms of scanning mechanisms, data collection method, resolution, and accuracy of data, but they are similar in capturing point cloud data and obtaining imagery. Each airborne LiDAR and terrestrial LiDAR are used in different applications and have their own advantages and disadvantages (Muhadi et al., 2020). In the following, we discuss the mechanisms of each of these categories and their strengths and weaknesses:
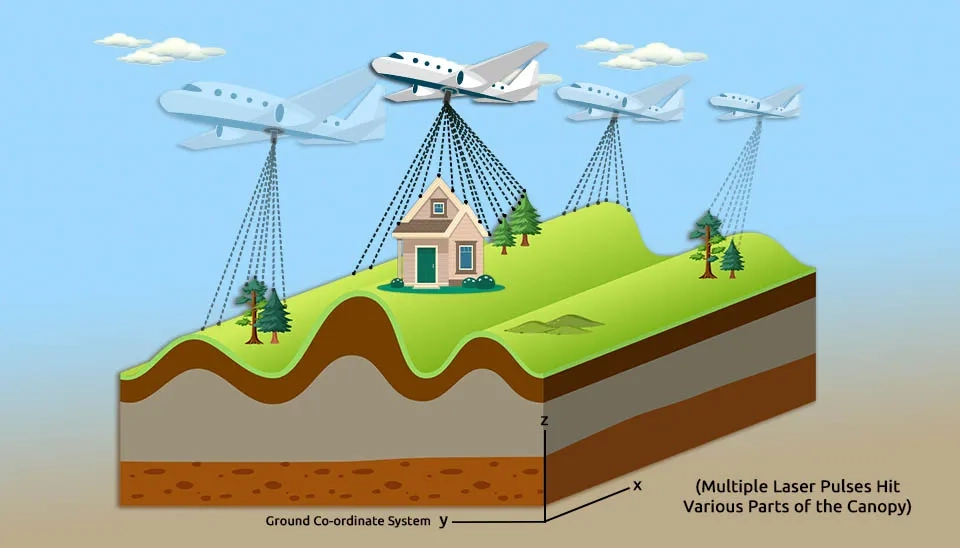
Airborne LiDAR is a type of LiDAR that consists of multiple sensors, laser scanners, photo and video recording equipment, a platform, data storage memory, and positioning hardware. A platform is a flying device such as an airplane or a helicopter so that a laser scanner is installed on the platform, and by moving and flying the platform, the laser sensor can record information in an area (Lemmens, 2011).
An airborne LiDAR sensor emits laser pulses with wavelengths of 1000 to 1600 nm toward the ground. The laser pulses emitted to the ground are backscattered by various objects such as structures and buildings, vegetation, water bodies, and the surface of the earth and return to the sensor. The characteristic of the return signal is recorded by the sensor and the sensor can measure the distance traveled since the laser pulse goes back and forth. In addition, the LiDAR sensor uses positioning systems such as Global Positioning System (GPS) and Inertial Measurement Unit (IMU) to measure distance and orientation. Therefore, the accuracy of GPS and IMU affects the resolution and accuracy of LiDAR data (Chen, 2016). GPS records longitude, latitude, and altitude (X, Y, and Z location) to measure the exact location of the sensor. GPS can reach the accuracy of a few centimeters through ground GPS stations and help the accuracy of airborne LiDAR. On the other hand, the IMU is responsible for measuring the precise position, trajectory, and orientation of the aircraft (Cracknell, 2007).
By mapping the red, green, and blue values on the location of the referenced point, the photo and video recording equipment records color information by flying on the platform together with the LiDAR sensor. Then the raw data collected by the scanner, IMU, and GPS is stored in the memory. The majority of the stored data is the data of laser scanners, which can produce about 20 GB per hour, while the volume of IMU and GPS data is less than one percent of the data of laser scanners (Vosselman and Maas, 2010).
Terrestrial LiDAR technology in remote sensing, or in other words terrestrial laser scanner, is located on the surface of the earth and is generally used for topography and land mapping. Terrestrial LiDAR is divided into static laser scanners and mobile laser scanners, and the components and mechanisms of each are discussed in the next section. In general, in the static laser scanner, the sensor is installed in a fixed position, but in the mobile laser scanner, the sensor is installed on a mobile ground-based platform such as a vehicle. Generally, terrestrial LiDAR refers to static laser scanners. In both static laser scanner and mobile laser scanner systems, the main part of the scanner is a laser scanner in which lasers with a wavelength of 500 to 600 nm are used. Similar to airborne LiDAR systems, terrestrial LiDAR has a photo and video camera that is used for 3D modeling and colorizing point clouds (Dong and Chen, 2017).
The components of the static laser scanner system are a scanning mechanism, ranging unit, laser control unit, digital camera, and internal memory for data recording. The static laser scanner is installed on top of the fixed surveying tripod and is integrated with one or two mirrors to change the direction of the laser pulses to achieve a two-dimensional scanning pattern. These mirrors provide the ability to measure distances from surrounding objects and scan them by measuring the return time of laser pulses by terrestrial laser scanners. A static laser scanner emits an infrared laser beam to the center of a rotating mirror, and after reflection from the mirror, the laser beam is deflected to the area around the scan. Then the scattered light hits the desired objects and is reflected towards the scanner. The coverage of terrestrial static laser scanning is between 100 and 300 meters. Still, if you need information about the surrounding environment, you can install a digital camera on the rotating axis of the scanner to record more information about the environment. The stable position and orientation of a static terrestrial LiDAR scanner increase the geometric quality of point clouds, which is the advantage of static terrestrial LiDAR scanning (Vosselman and Maas, 2010; Thenkabail, 2018; Dassot et al, 2011).

Mobile laser scanners, which are in the category of terrestrial laser scanners, have the same mechanism as airborne LiDAR and are installed on a mobile platform. The mobile platform can be a vehicle like a car. Mobile laser scanners need only one scanning direction and the other direction is through the platform that is moving. Measuring the exact coordinates and orientation of the scanner, according to the continuous movement of the scanner on a moving platform, is done by systems based on IMU and GPS technologies. By moving the scanner and recording its trajectory and attitude, a three-dimensional point cloud with a few centimeter point spacing is generated from the collected data (Wang et al., 2020).

Both terrestrial LiDAR and airborne LiDAR methods have advantages and disadvantages depending on their application, which can be used in different fields. Due to higher automation and faster data collection systems, airborne LiDAR scanners can collect vast amounts of data in less time compared to terrestrial LiDAR scanners. They can analyze an area of about 50 square kilometers within an hour and collect its information. In addition, airborne LiDAR technology in remote sensing can give a better view of the phenomenon on the ground by recording images from high altitudes. In contrast, terrestrial LiDARs are capable of producing high-resolution data. Although terrestrial LiDAR has less spatial coverage than airborne LiDAR, it provides more and more accurate information about the details of the ground in small areas. The density of data measurement in terrestrial LiDAR is about 100 points in a square meter and at a rate of half a million points per second (Olsen et al., 2013). The limitation of terrestrial LiDAR in identifying topographic features is related to inaccessible areas such as private lands and sloping areas (Turner et al., 2013).
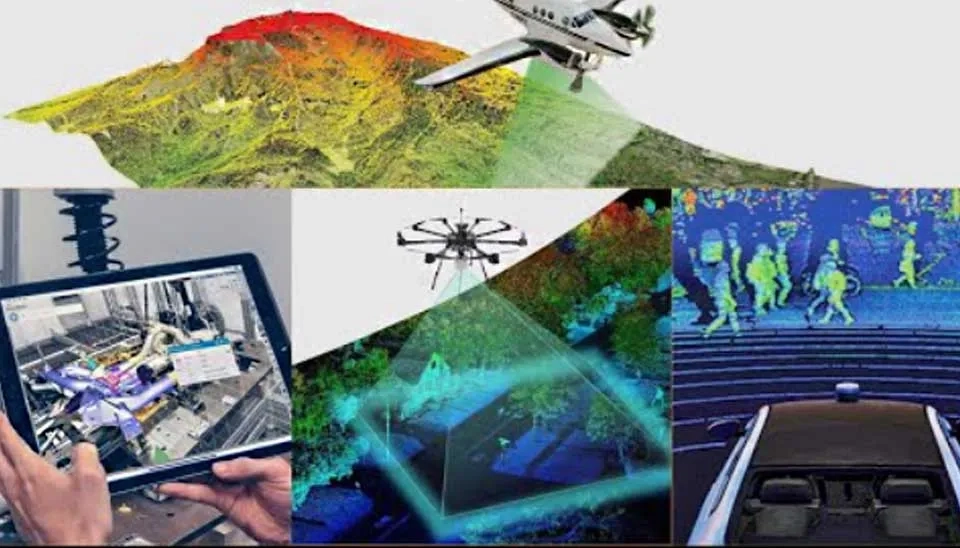
Both categories of LiDAR technology in remote sensing (airborne LiDAR and terrestrial LiDAR) are widely used in different fields. Some of the applications of LiDAR remote sensing are given in the following table (Neoge and Mehendale, 2020):
Table. 1. Applications of LiDAR remote sensing in several fields
Field | Applications |
LiDAR in water science | Coastal management, flood management and modeling (flood hazard and risk mapping), urban inundation modeling, high-resolution Digital Elevation Model (DEM), surface roughness maps, hydrodynamic model verification, water levels measurement, ocean measurement, etc. |
LiDAR in agriculture | Precision farming, weed detection, insect detection, seed and fertilizer spreading, crop scanning, spraying location identification, etc. |
LiDAR in forestry | Forest management, forest canopy, tree height, crown width and diameter, measurement of vegetation cover, etc. |
LiDAR in archaeology | Extraction of land features, modeling of archaeological sites with high resolution, topographical information, etc. |
LiDAR in atmosphere | Measurement of wind speed and direction, identification of suspended particles in the air, characteristics of clouds, emission of greenhouse gases, different components of the atmosphere, etc. |
LiDAR in mapping | Applications in the DEM, Applications in the Digital Terrain Model (DTM) |
LiDAR in transportation and vehicles | Identifying obstacles and avoiding collisions with them, wide applications in self-driving cars in the future to reduce the risk of accidents, measuring the speed of passing vehicles and speed control, etc. |
LiDAR in mining | Calculating the volume of the mine, estimating the amount of ore harvested, application in automatic mining vehicles, detecting obstacles and avoiding collisions, etc. |
In this article, Light Detection and Ranging (LiDAR) technology is discussed as a branch of remote sensing. Based on the data collection mechanism, there are two types of LiDAR remote sensing: Airborne LiDAR and terrestrial LiDAR technology in remote sensing. The main difference between airborne LiDAR and terrestrial LiDAR is the position of its sensor for laser scanning, which causes the disadvantages and advantages and separate applications of each of these two categories. Terrestrial LiDARs are also divided into two categories: Static laser scanners and mobile laser scanners, which differ in whether the platform is fixed or mobile. In general, the diversity of LiDAR mechanisms and methods has caused it to be widely used in different fields (water science, agriculture, forestry, archaeology, atmosphere, mapping, transportation and vehicles, mining, robotics, military, etc.). Finally, it is expected that by solving its challenges, it will be more and more useful in different aspects of human life in the future.
LiDAR in robotics | Environment scanning, obstacle detection and collision avoidance, safe landing of robots, object detection, etc |
LiDAR in military | Detection of the location of combat equipment such as tanks and mines, detection of bioaerosols and biological threats in the form of aerosols, protective measures, etc. |
Keep reading




Comments
No comments yet
Be the first to comment
Share your thoughts and start the conversation.